




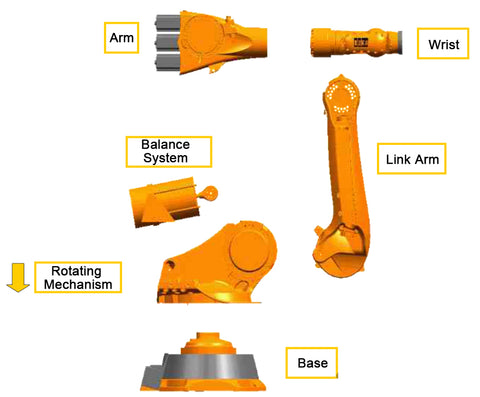
Les robots KUKA sont réputés pour leur précision et leur adaptabilité exceptionnelles en automatisation industrielle. Ces appareils de pointe sont capables d'exécuter une multitude de tâches, allant du soudage et de l'assemblage à la manutention et à l'usinage de précision. L'essence même d'un robot KUKA réside dans son architecture système avancée, qui harmonise composants matériels et logiciels pour atteindre des performances et une fiabilité supérieures.
Le panneau de commande KUKA (KCP) constitue le cœur des robots KUKA et offre aux opérateurs une plateforme conviviale pour superviser et piloter les fonctions robotiques. Conçu dans un souci d'ergonomie, le KCP garantit confort et efficacité d'utilisation.
Ce panneau est doté d'un écran tactile haute définition qui facilite la navigation dans le système opérationnel du robot. Il offre une visualisation précise des mouvements et de l'état du robot, permettant une surveillance et des ajustements opérationnels en temps réel. Le KCP intègre également des fonctionnalités de programmation avancées, permettant aux utilisateurs de concevoir des séquences robotiques complexes avec précision.
L'armoire de commande du robot KUKA (KR C2) est le composant central du système robotique KUKA, contenant l'unité centrale de traitement et l'alimentation électrique qui propulsent les fonctions du robot.
Compact et puissant, le KR C2 est équipé de processeurs sophistiqués capables de gérer les calculs complexes nécessaires à un contrôle robotique précis. Il est équipé d'une alimentation robuste qui assure une alimentation électrique stable au robot, même dans des conditions variables.

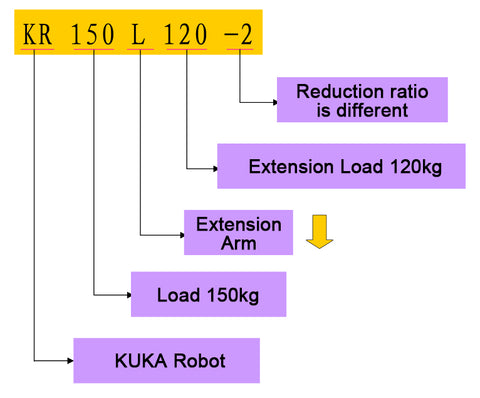
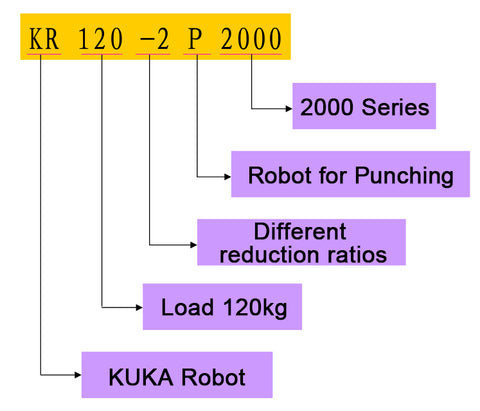
1. Le KRXXX est standard, mais le L120-2 à l'arrière ne l'est pas. Par exemple, le modèle de robot à 34 lignes est le KR120-2P2000.
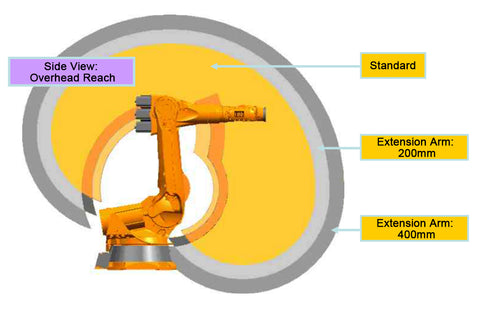
2. La charge fait référence à la capacité du point TCP, 150 kg fait référence à la capacité du point central à 6 axes ; et 120 kg servent à augmenter le bras d'extension en fonction de la nouvelle capacité du point TCP (augmentation du couple).
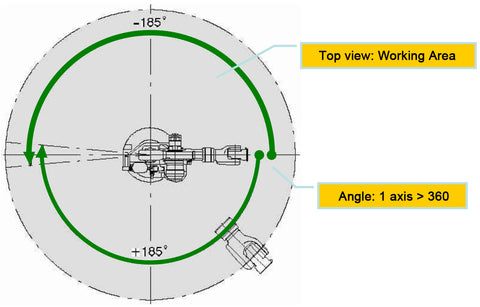
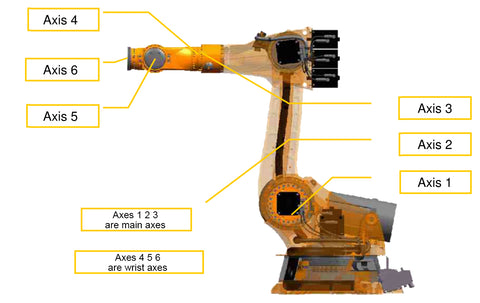
Les axes 1, 2 et 3 sont les axes principaux, les axes 4, 5 et 6 sont les axes du poignet
L'article et les images proviennent d'Internet et sont protégés par les droits d'auteur des auteurs originaux.
Explore the Full Guide: Industrial Robot Knowledge Hub → Industrial Robot Types & Applications Cluster
Explore foundational knowledge and practical insights to better understand industrial robot systems and components.
Key components commonly involved in robot applications issues and replacements.



{"one"=>"Sélectionnez 2 ou 3 articles à comparer", "other"=>"{{ count }} éléments sélectionnés sur 3"}
Sélectionnez le premier élément à comparer
Sélectionnez le deuxième élément à comparer
Sélectionnez le troisième élément à comparer
Laisser un commentaire